Zwei unabhängigen Maschinen werden auf diese Weise wie mit einem elektronischen Getriebe verbunden.


| Verteilter Gleichlauf |
| Um den hohen Ansprüchen einer Großbäckerei und eines bekannten
Pizzaherstellers gerecht zu werden, hat die Firma Hahn erstmals den
verteilten Gleichlauf genutzt. Die Eintaktung der Produktzufuhr wurde
mit einer horizontalen Verpackungsmaschine synchronisiert. Zwei unabhängigen Maschinen werden auf diese Weise wie mit einem elektronischen Getriebe verbunden. |
|
| In Verpackungsmaschinen werden die Antriebe häufig über einen
Gleichlaufverbund, das heißt über elektronische Getriebe beziehungsweise
elektronische Kurvenscheiben, koordiniert. Dazu müssen die Steuerungen
eines dezentralen Automatisierungsverbundes miteinander synchronisiert
und die Gleichlaufbeziehungen über Gerätegrenzen hinweg aufrecht
erhalten werden. Dezentrale Simotion-Steuerungen synchronisieren ihre
Task-Systeme über den taktsynchronen Profibus zueinander. Mit der
Funktion „Verteilter Gleichlauf“ ist es möglich, mechatronische
Funktionseinheiten mit eigener Steuerung einfach aufzubauen und
Master-Slave-Beziehungen über mehrere Simotion-Geräte hinweg zu
synchronisieren. Ein virtueller Master gibt beispielsweise in der
Basismaschine die Produktionsgeschwindigkeit für den gesamten
Automatisierungsverbund vor. Als Beispiel sei eine modulare
Schlauchbeutelmaschine mit zwei mechatronischen Funktionseinheiten, die
Grundmaschine und die Produktzuführung, angeführt. Beide
Funktionseinheiten haben jeweils eine abgeschlossene Funktionalität und
sind über verteilten Gleichlauf miteinander verbunden. Sie können
separat voneinander programmiert, getestet und in Betrieb genommen
werden – ein Zeitvorteil, der sich auszahlt. Außerdem kann der Kunde die
Maschine mit oder ohne Produktzuführung bestellen, ohne dass eine
Software-Änderung erforderlich ist. |
|
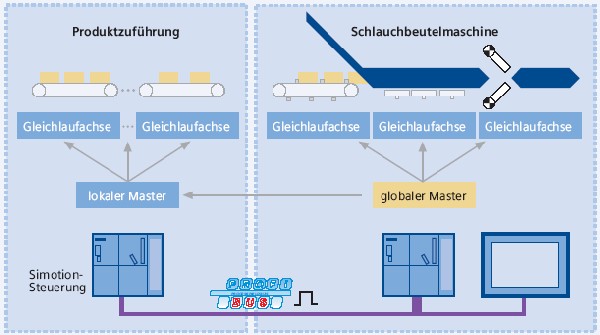
| Abb. 1 - Funktionsprinzip des verteilten Gleichlaufs |
| Zwei Simotionsteuerungen werden über Profibus verbunden und synchronisiert. Die Bedienung beider Maschinen kann über ein HMI ausgeführt werden. |
